轻巧灵活,掌控全场
拥有稳定的步态和极致的奔跑速度,轻松实现单刀破门
轻巧灵活,掌控全场
拥有稳定的步态和极致的奔跑速度,轻松实现单刀破门
稳定坚韧,无惧干扰
拥有行业领先的运控系统,完美应对比赛对抗
身手敏捷,实力超群
基于Yolo 11网络算法,实现球场环境快速识别,精准定位
unitree_rl_gym
强化学习框架
高效的仿真环境:集成 Isaac Gym 和 Mujoco 等仿真工具,提供高效的物理仿真能力。
灵活的训练配置:用户可以通过配置文件调整训练参数,如环境数量、随机种子、最大迭代次数等。
完整的训练流程:支持从仿真训练(Sim2Sim)到真实机器人部署(Sim2Real)的全流程。
RoboCup SDK
开发指南
视觉识别API:内置YOLO11最新一代实时目标检测算法,提供丰富的球场信息接口。
空间定位API:通过单目几何定位和双目深度定位,提供精准的球场位置信息接口。
运动控制API: 根据视觉检测结果、场地信息和比赛规则等,为决策系统提供不同的运动控制接口。
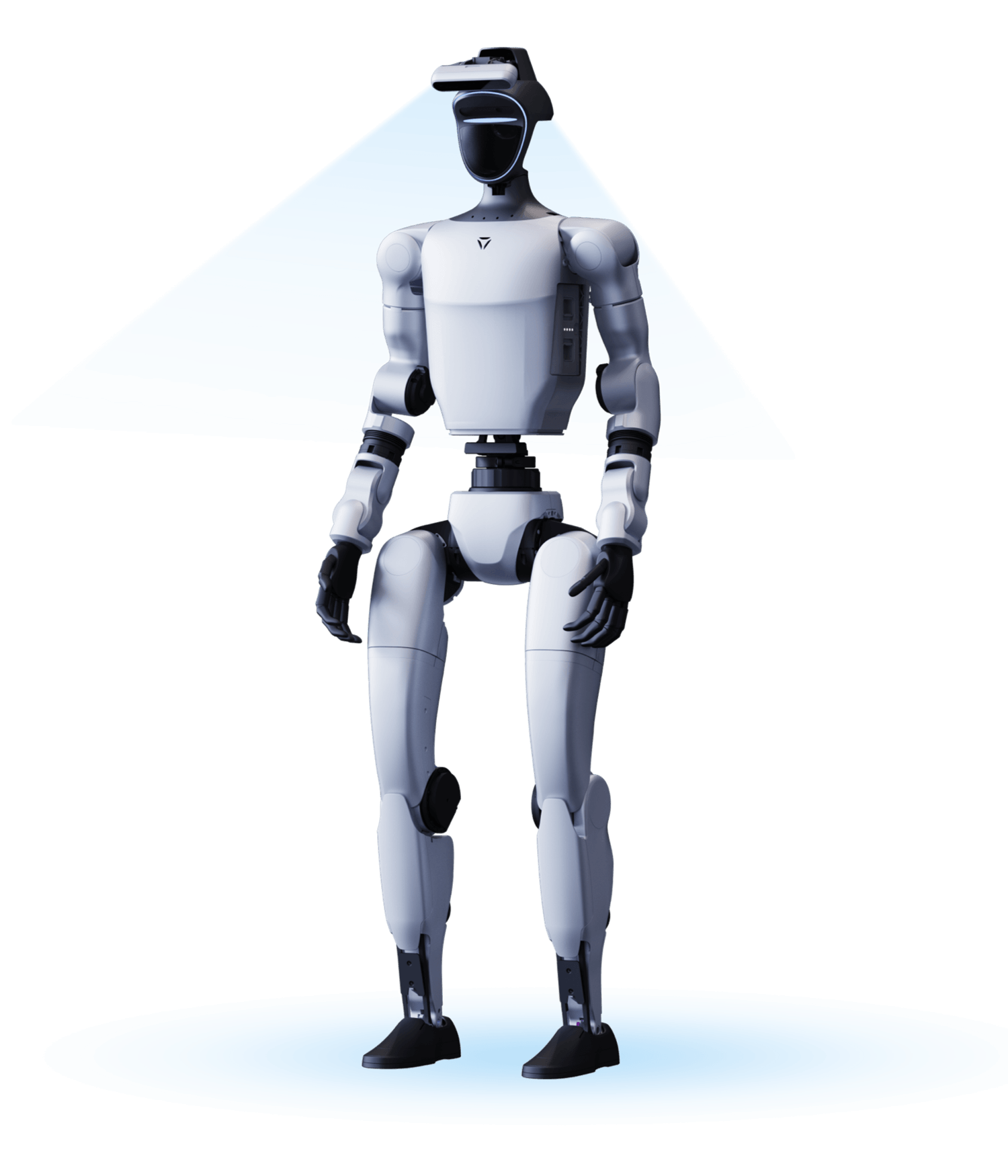
Unitree G1-Comp

Unitree G1-Comp
共创未来,征战赛场
API
高层运控接口、底层运控接口
状态服务接口、DDS通信接口
音频灯光服务接口
仿真环境
Isaac gym
Mujoco
多模态交互
UnifoLM大模型
支持TTS、ASR
支持Yolo识别算法
ROS支持
兼容ROS生态
APP支持
快速配置机器人和查看状态
开发计算单元
Jetson Orin NX
提供100TOPS AI算力
双编码器
精准稳定,无惧干扰
皮实耐造
外壳覆盖铝合金
及高强度工程塑料
身型数据
体重约35kg
身高约130cm

续航时间
约2小时,支持快换快充

型号
G1 Comp
高宽厚(站立)
1320x450x200mm
高宽厚(折叠)
690x450x300mm
带电池重量
约35kg+
总自由度(关节电机)
25-45
单腿自由度
6
腰部自由度
1+(可加选2个腰部自由度)
单手臂自由度
5
头部自由度
2
单手自由度
7(可加选力控3指灵巧手Dex3-1)+ 2(可加选2个手腕自由度)
*3指灵巧手Dex3-1参数:大拇指3个主动自由度;食指2个主动自由度;中指2个主动自由度
**Dex3-1可加选安装多点触觉阵列
膝关节最大扭矩【1】
120N.m
手臂最大负载【2】
约3Kg
小腿+大腿长度
0.6M
手臂臂展
约0.45M
超大关节运动空间
腰关节:Z±155°、X±45°、Y±30°
膝关节:0~165°
髋关节:P±154°、R-30~+170°、Y±158°
腕关节:P±92.5°、Y±92.5°
全关节中空内走线
有
关节编码器
双编码器
散热系统
局部风冷散热
供电方式
13串锂电池
基础算力
8核高性能CPU
感知传感器
深度相机、3D激光雷达
4麦克风阵列
有
5w扬声器
有
WiFi6、蓝牙5.2
有
高算力模组
NVIDIA Jetson Orin
智能电池(快拆)
9000mAh
充电器
54V 5A
手持式遥控器
有
续航时间
约2h
智能OTA升级
有
二次开发【3】
有
售价(含税)
联系销售
[1]
整机关节电机,最大扭矩有差异,此为其中最大关节电机的最大扭矩
[2]
手臂最大负载,不同手臂伸展姿态下,差异很大
[3]
详细功能,请查看二次开发手册
[4]
以上参数,在不同业务场景、不同型号参数配置等情况,在应用中有所差异,请以实际为准
[5]
人形机器人结构复杂,动力极其强劲,请用户让人和机器人保持足够的安全距离,请务必小心使用
[6]
产品外观后续可能会有升级调整,请以届时实物为准
[7]
本页面有些示例功能,还在开发测试完善,后续陆续开放给用户
本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
请访问宇树科技官网了解更多产品相关条款与政策,请遵守各地区法律法规。