机器人
机器狗 - 消费级/科研
应用方案
行业应用
健身
产品推荐
服务与支持
关于宇树
APP 下载




















全新升级 L2
Unitree 4D LiDAR
¥1799
观看视频 ▶
提供整套开源SLAM方案
仅使用L2及其内置IMU,不使用其他定位传感器,通过POINT-LIO算法建图。
360°×96°
超广角扫描
0.05m
近处盲区
30m
@90%反射率
64000 点/s
有效点频
2cm
测量精度
230g
重量
网口/串口
通讯接口
75×75×65mm
体积小巧
- 64000点/s有效点频
同比提升200%
- 4.5mm测距分辨率
同比提升78%
- 360°×96°FOV
同比提升7%

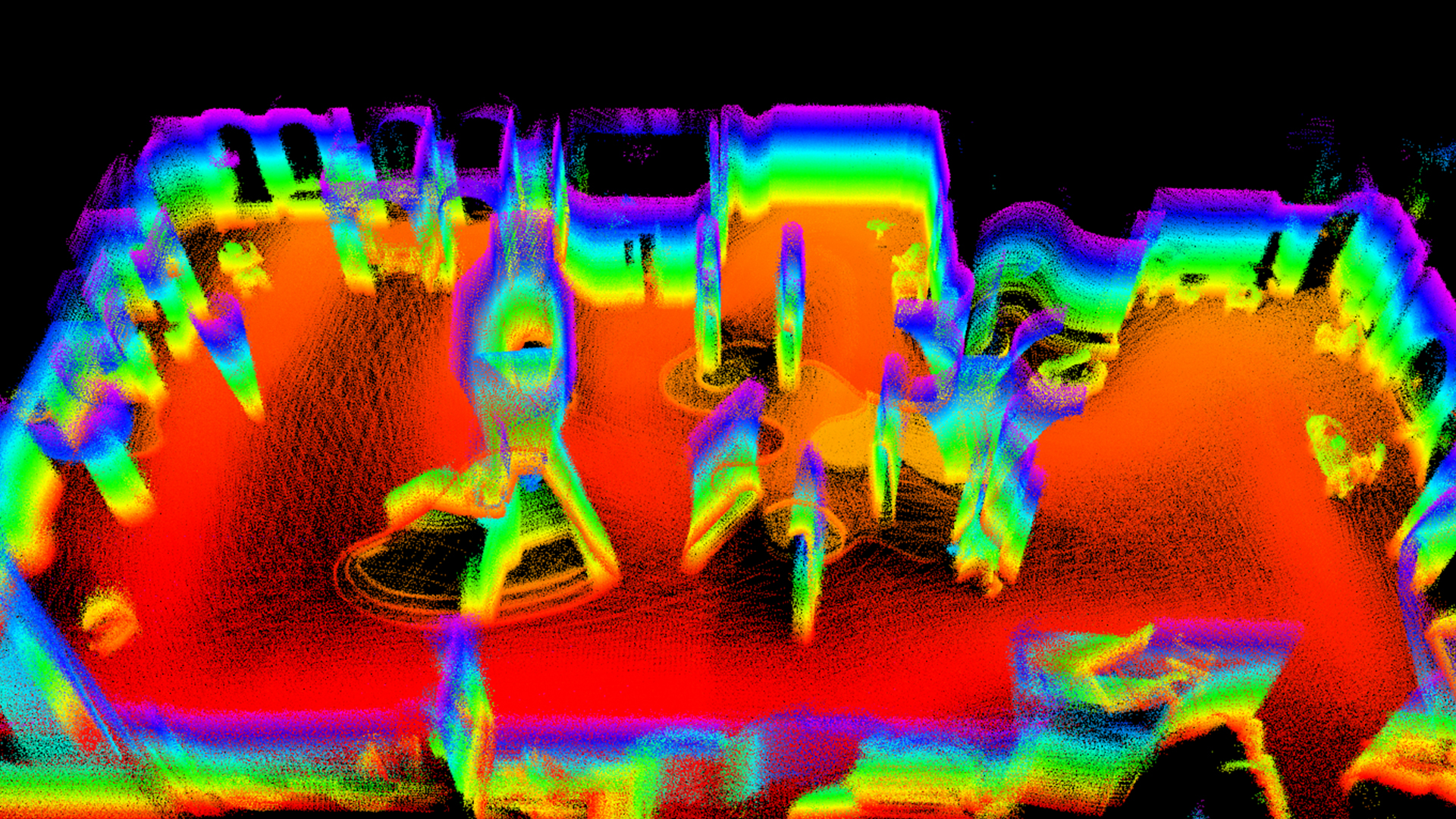
室内全屋动态扫描
L2 可以快速、高精度地获取全屋的三维结构信息,方便移动机器人定位和自主导航,并且可以帮助机器人拓展全屋清洁整理等更加丰富的功能
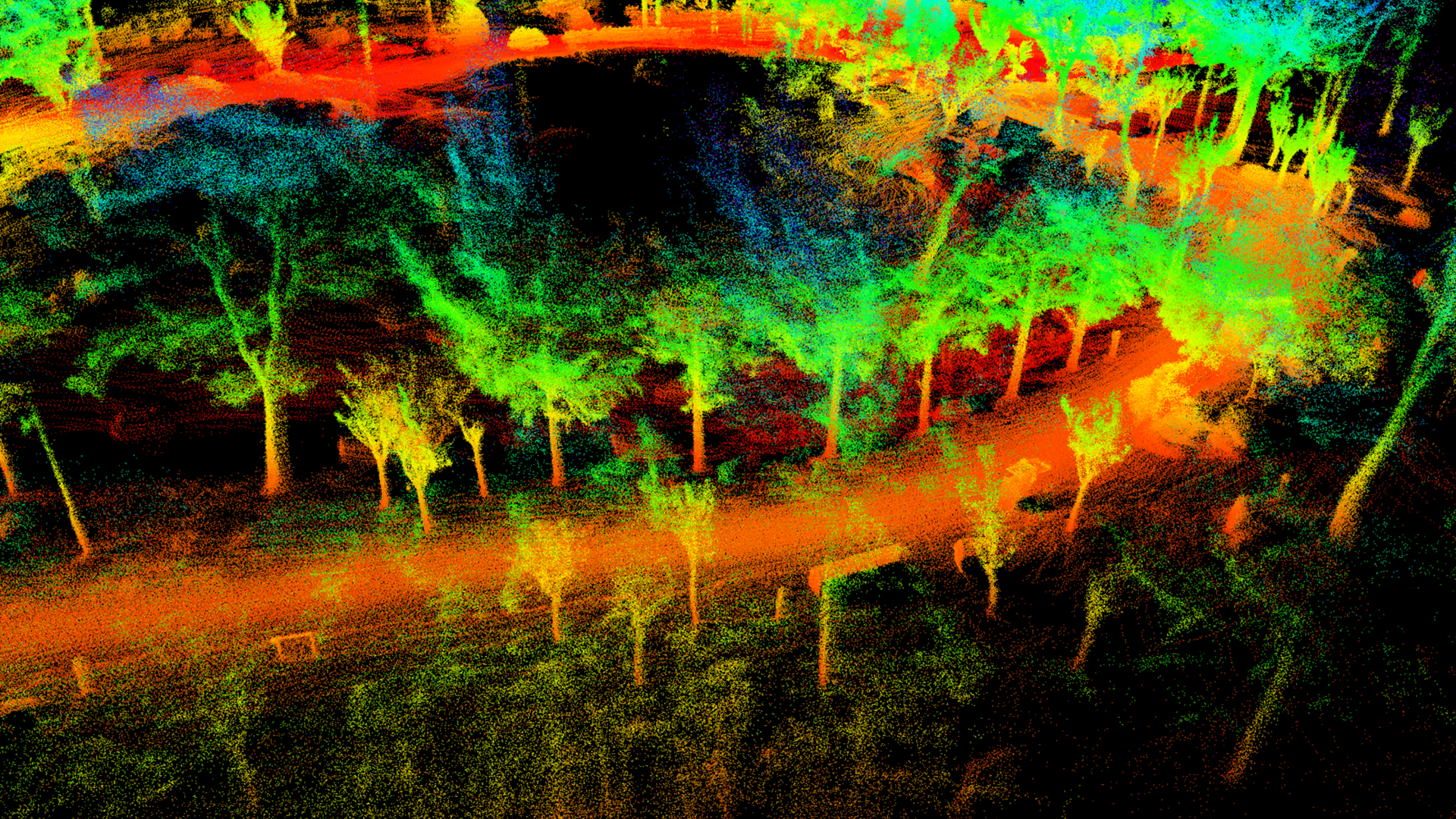
户外实景动态扫描
L2能有效抵抗室内环境光和室外强光干扰,在室外100Klux的强光下,实现稳定测距与高精度建图
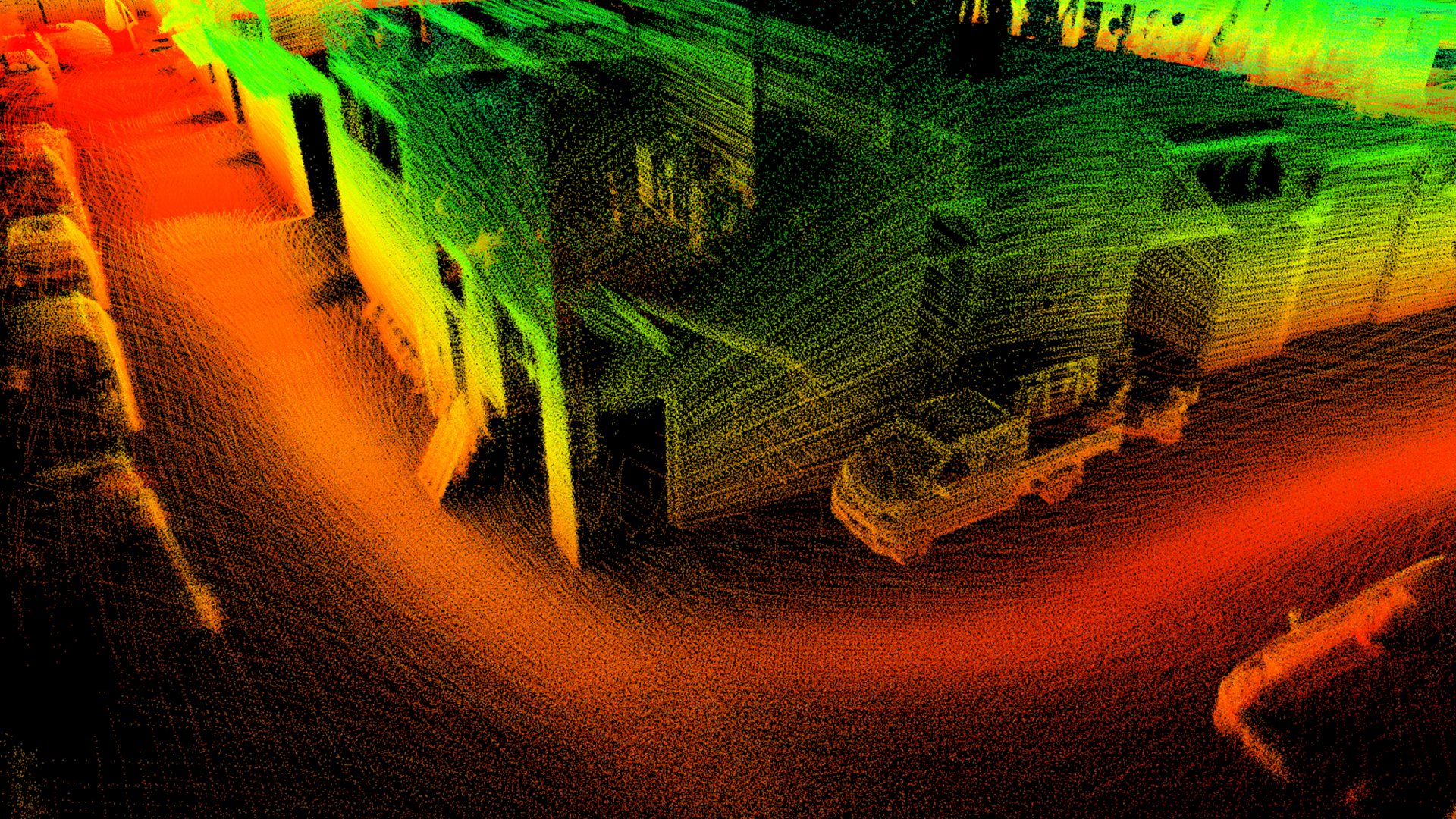
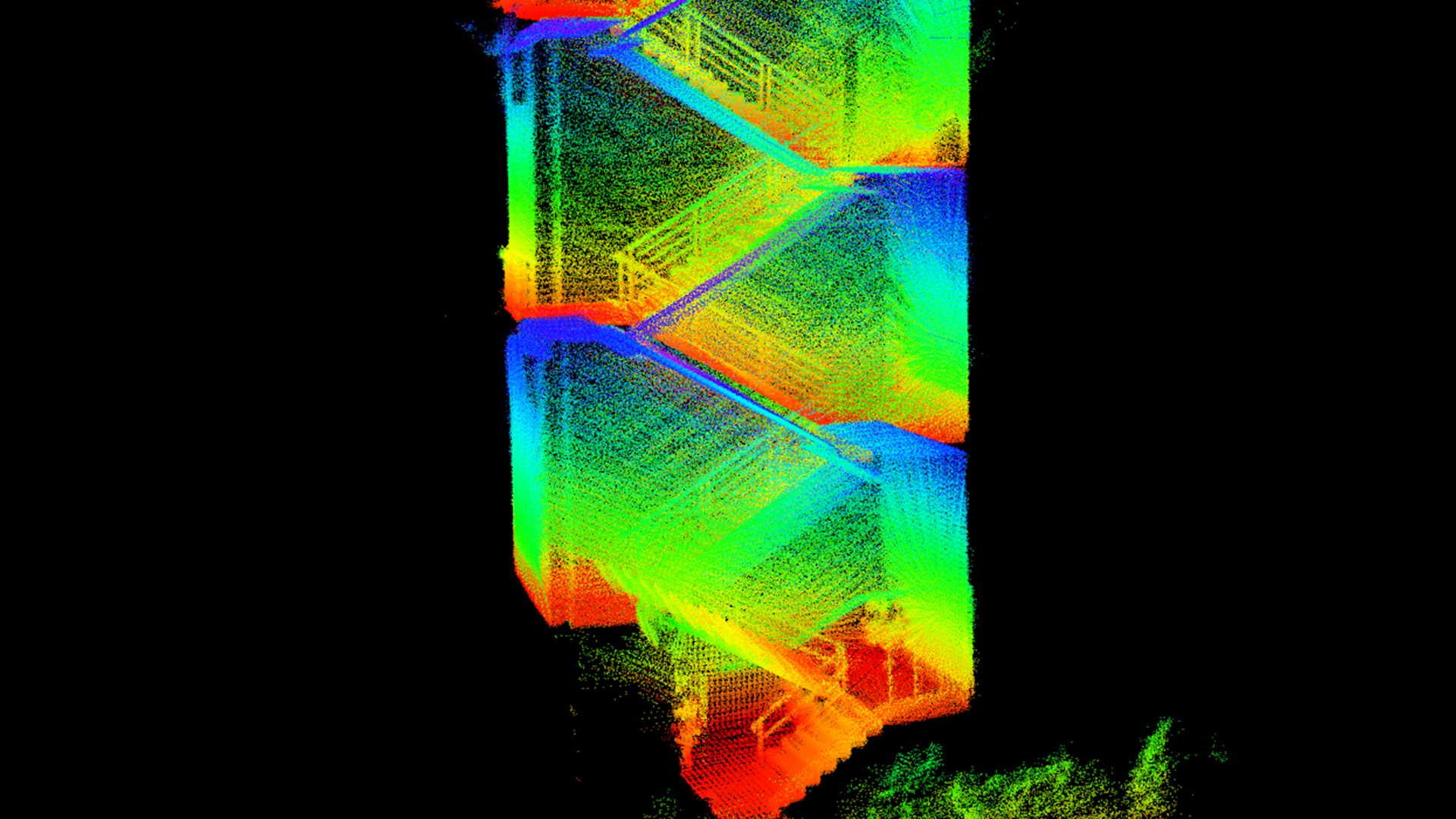
非重复扫描
L2 通过全向超广角非重复扫描,可以得到高精度和高密度的点云数据,实现图像级的扫描效果
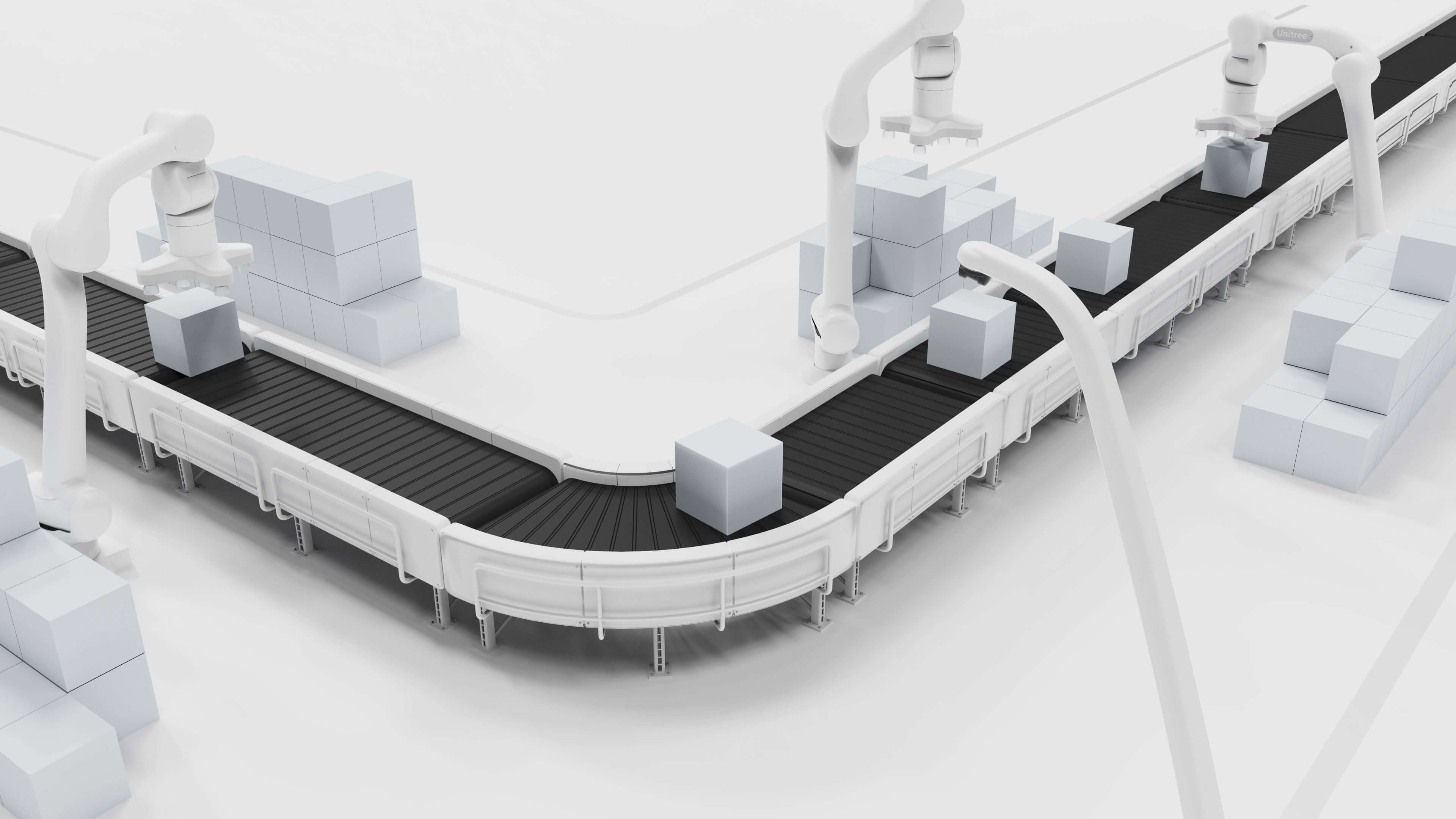
推荐部署方案
物流仓储

智能配送

扫地机器人

智能工农

智慧工厂
Unitree 4D LiDAR L2
Unitree L2
¥1799
某深度相机
¥2500
某广角3D补盲雷达
¥5000+
参数对比
- 产品Unitree L2某深度相机某广角3D补盲雷达
- FOV360° × 96°86° × 57° (土3°)120° × 75°
- 非重复扫描是否否
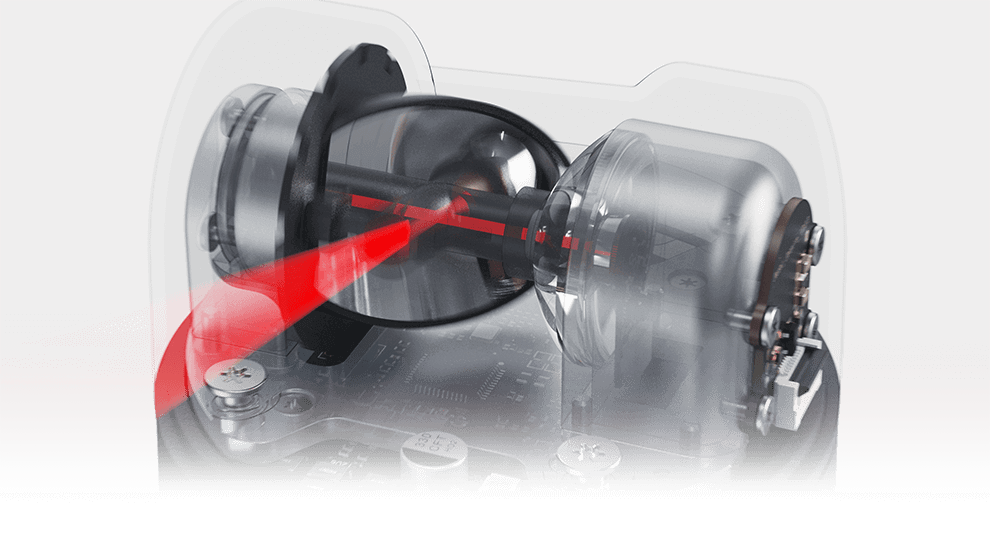
- 扫描方式非接触无刷转镜扫描全局快门固态或准固态扫描
- 数据接收处理CPU消耗(用户附加成本)极低高高
- 扫描距离30m4-5m30m
- 近处盲区0.05m0.1m0.3m
- IMU3轴加速度+3轴陀螺仪无无
- 功率10W5W12W
- 尺寸 mm75×75×6590×25×25100×130×65
- 重量230g约100g约500g
- 工作环境室内/室外室内/室外(近距离)室内/室外
- 实现技术激光TOF红外双目激光TOF
产品型号
- 型号
L2
L1 PM
(Precision Measurement)
L1 RM
(Remote Measurement)
- 价格
¥1799
¥999
¥1299
- 扫描距离
30m(@90% 反射率)
15m(@10% 反射率)
20m(@90% 反射率)
10m(@10% 反射率)
30m(@90% 反射率)
15m(@10% 反射率)
- FOV
360°×96°
360°×90°
360°×90°
- 采样频率
128000点/秒
43200点/秒
43200点/秒
- 有效频率
64000点/秒
21600点/秒
21600点/秒
- 通讯接口
网口/串口
串口
串口
- 4D数据
3D位置+1D灰度(支持2D模式)
3D位置+1D灰度
3D位置+1D灰度
- 周向扫描频率
5.55Hz(可定制调节)
11Hz
11Hz
- 竖直扫描频率
216Hz
180Hz
180Hz
- 测距分辨率
4.5mm
8mm
8mm
- 测量精度
≤ 2.0cm
± 2.0cm
± 2.0cm
- 测量盲区0.05m
- IMU3轴加速度+3轴陀螺仪
- 人眼安全等级Class 1(IEC60825-1:2014) 人眼安全
- 抗强光能力100Klux以上
[1]
L2 还支持负角度模式,在负角度模式下视场角将由360°x90°进一步扩展至360°x96°,所拓展的 6°视场角对应范围的最远测量距离会稍近一些。
[2]
此处仅展示了反射率典型值,实际值取决于环境条件及目标物体特性。
[3]
为保证对量程内不同反射率物体的有效探测,个别位置可能会出现点云精度轻微下降的现象,L2 正上方视野的量程最远。
[4]
为保证对量程内不同反射率物体的有效探测,个别位置可能会出现点云精度轻微下降的现象。
[5]
不同环境下的稳定功率和峰值功率不同 , 当环境温度范围为 -10℃至 30℃时,L2 将自动运行自加热模式,待温度满足要求后才会出点云,且此时峰值功率可达 13W,请合理设计供电电源,保证设备正常工作。
本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
请访问宇树科技官网了解更多产品相关条款与政策,请遵守各地区法律法规。
* 注:以上参数,在不同业务场景、不同雷达参数配置等情况,在应用中有所差异,请以实际为准。