Robot
Accessory

Go2 Battery
Fast Charging, Long-lasting Standby

Go2 Charger
High Security Protection, Fast Charging

R3 Controller
Newly Upgraded, Immersive Interaction

Go2 Foot End
Sense-sensitive, Reliable and Durable

Go1 Battery
Fast Charging, Long-lasting Standby

A1 Battery
Strong Power, Extraordinary Performance

Aliengo Battery
Excellent Motivation, Unlimited Ability
Industrial Applications
Fitness
Services And Support
About Unitree
APP Download













All New L2
Unitree 4D LiDAR
$419
Watch Video ▶
Provide a complete open-source SLAM solution.
Utilize only L2 and its built-in IMU, without employing other positioning sensors, to map using the POINT-LIO algorithm.
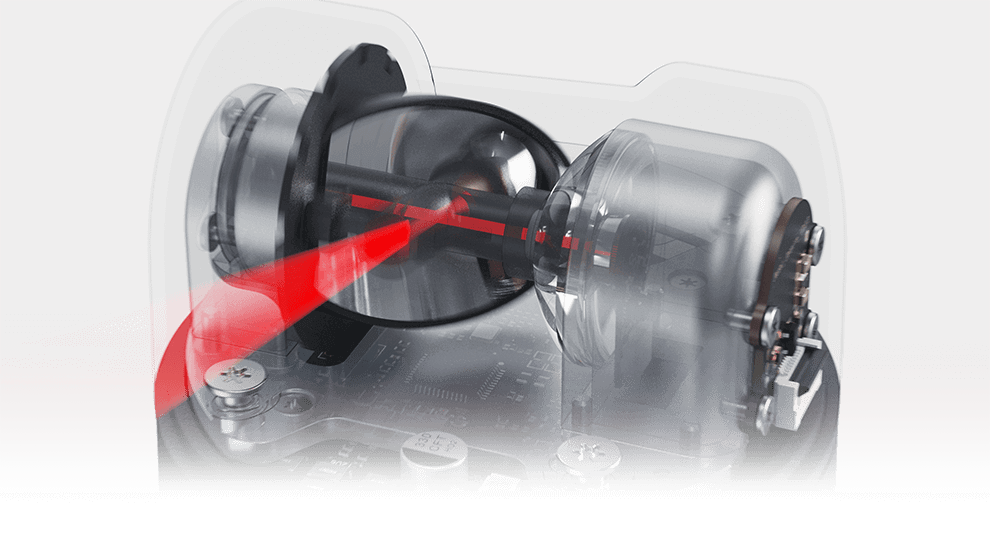
360°×96°
Ultra-wide-angle scanning
0.05m
Near blind spot
30m
@90% reflectivity
64000 points/s
Effective frequency
2cm
Measurement accuracy
230g
Weight
ENET UDP/TTL UART
Communication interface
75×75×65mm
Compact size
- 64000points/sEffective frequency
Synchronize and enhance by 200%.
- 4.5mmDistance resolution
Synchronize and enhance by 78%.
- 360°×96°FOV
Synchronize and enhance by 7%.

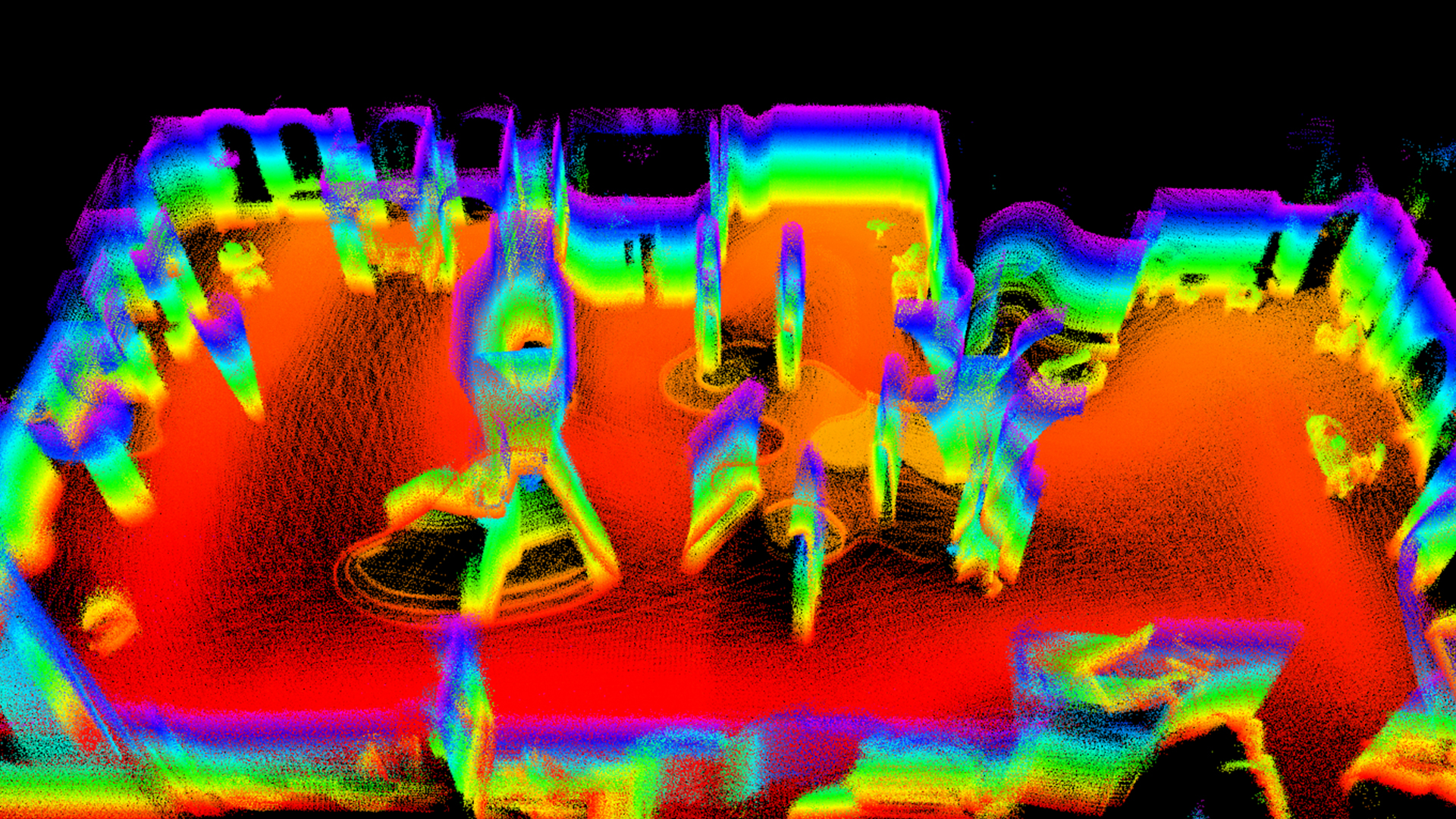
Indoor whole-house dynamic scanning.
L2 can quickly and accurately obtain the 3D structural information of the entire house, which facilitates the positioning and autonomous navigation of mobile robots. It can also help robots expand more diverse functions such as whole-house cleaning and organization.
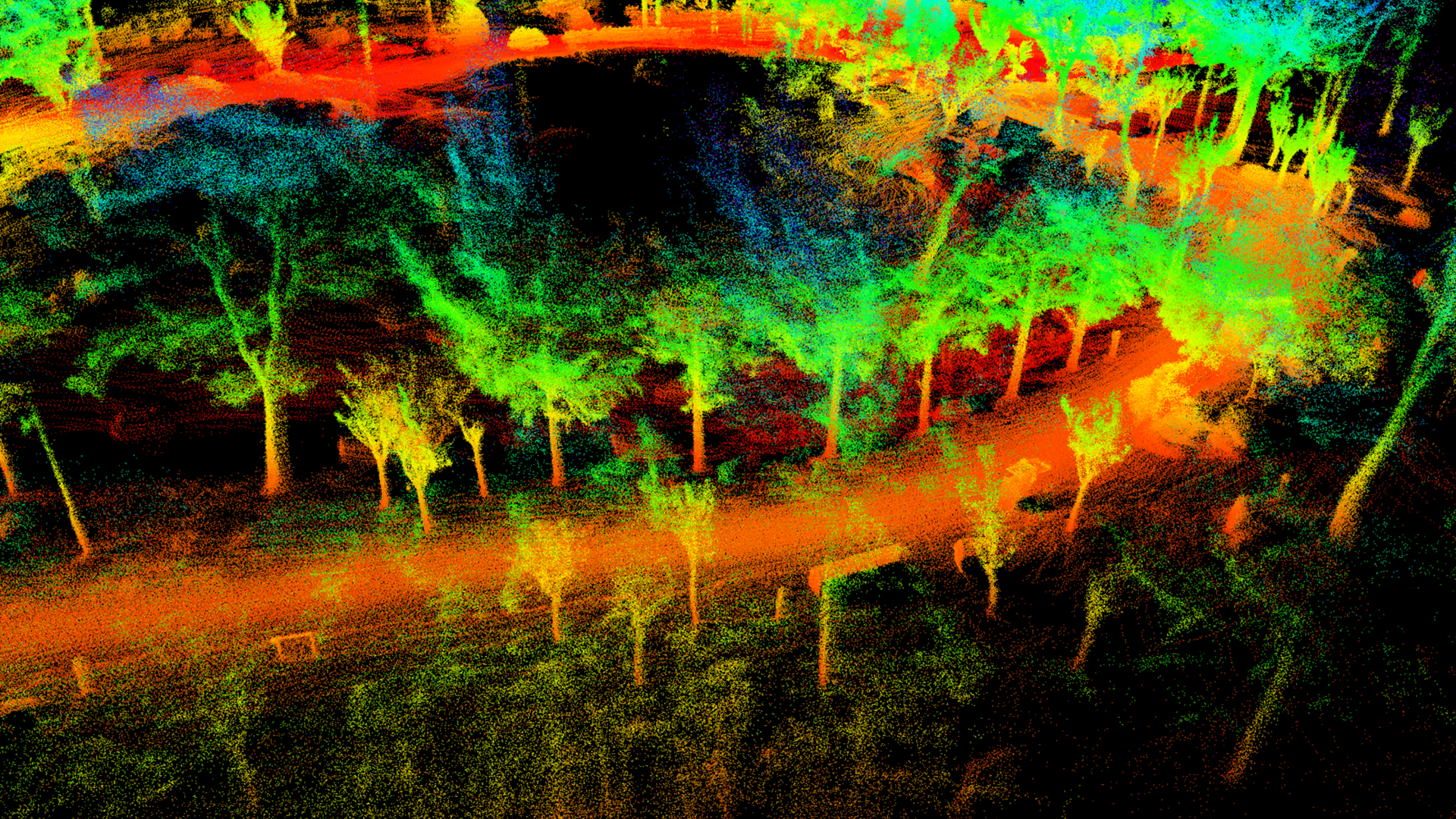
Outdoor real-scene dynamic scanning.
L2 can effectively resist the interference of indoor ambient light and outdoor strong light. Under strong light conditions of 100Klux outdoors, it can achieve stable ranging and high-precision mapping.
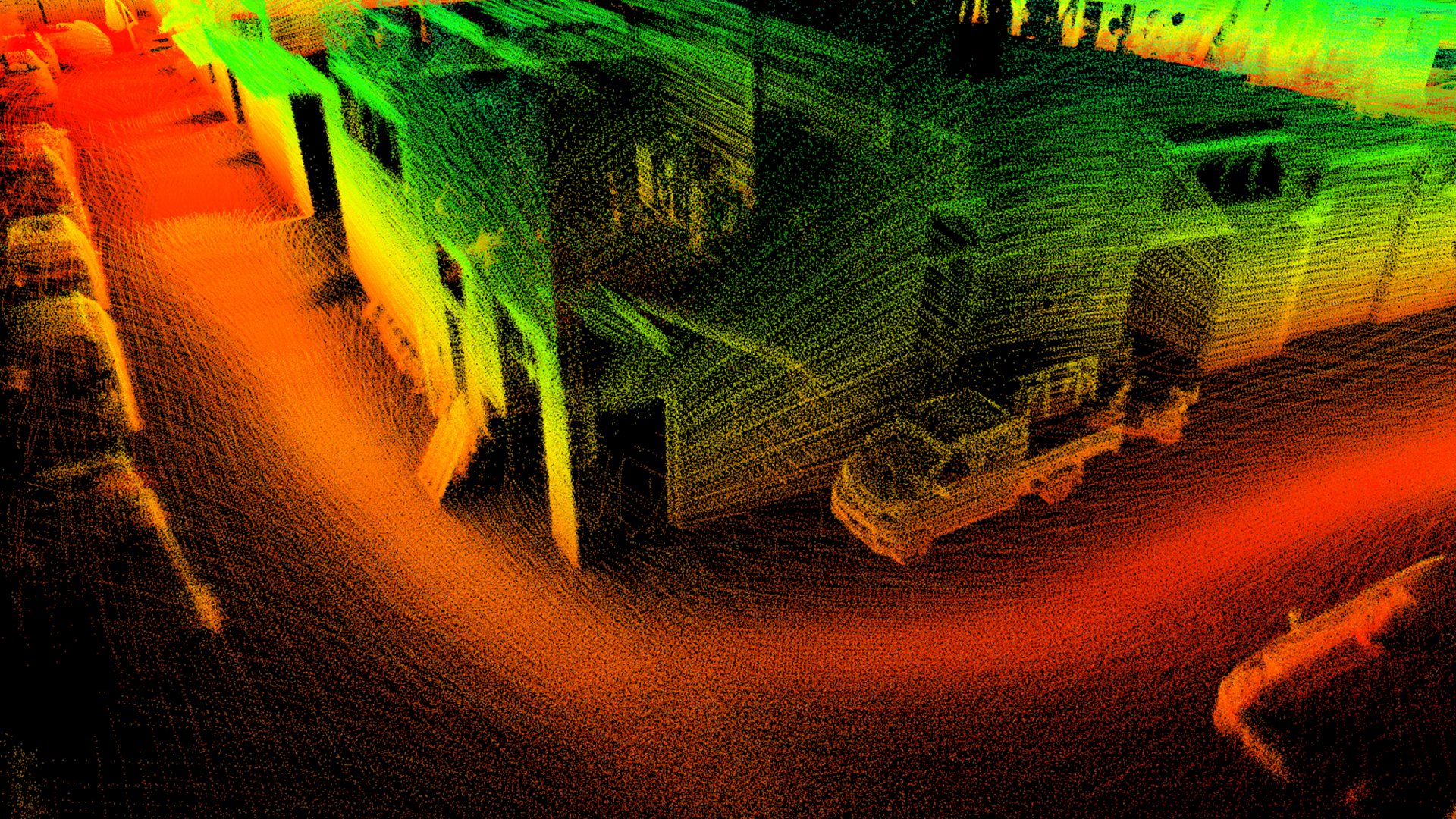
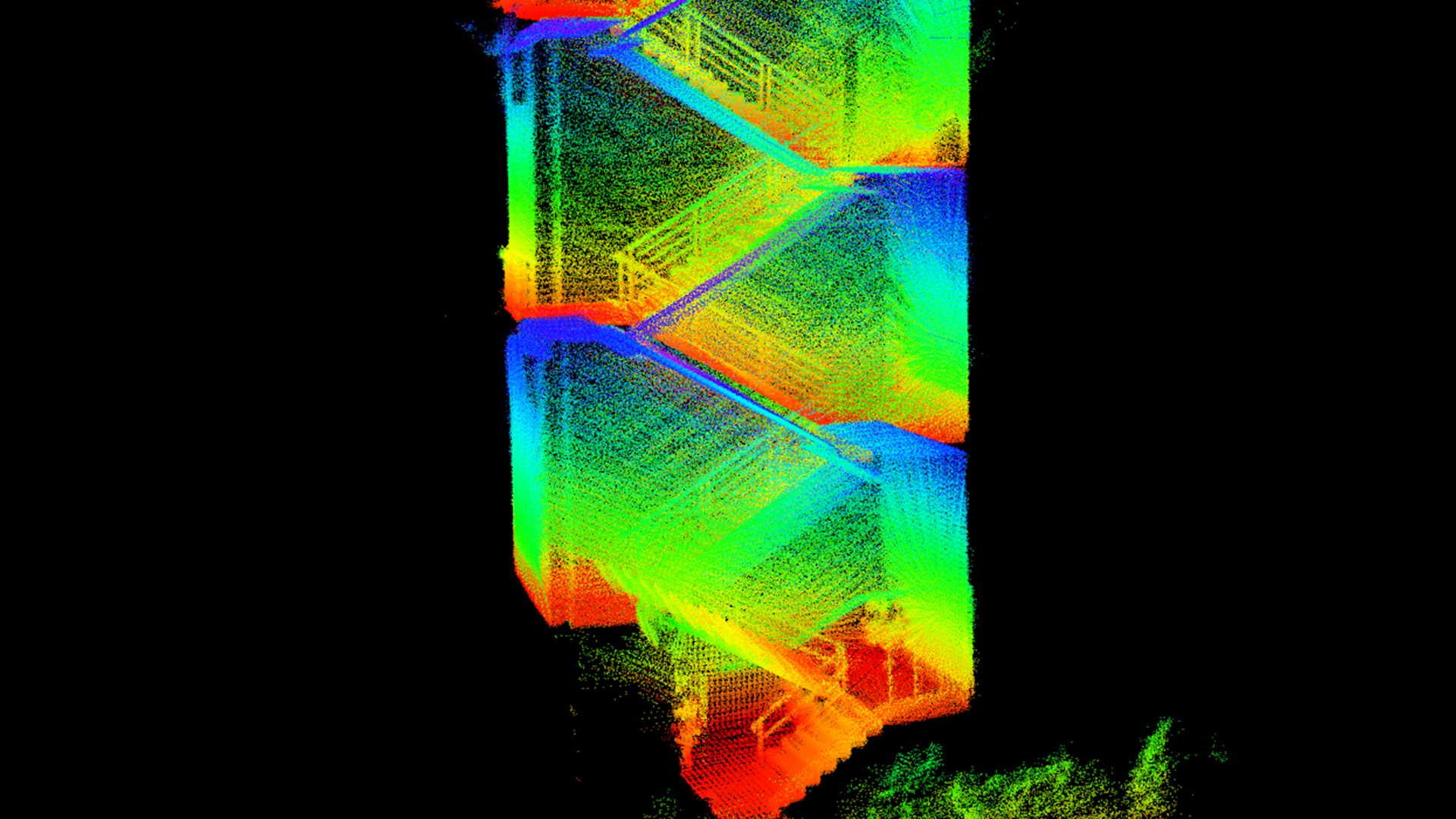
Non-repetitive scanning
L2 achieves high-precision and high-density point cloud data through omnidirectional ultra-wide-angle non-repetitive scanning, realizing photograph-level scanning effects.
Recommended deployment scheme
Logistics and warehousing

Intelligent distribution

Sweeping robot

Intelligent Industry and Agriculture

Smart Factory
Unitree 4D LiDAR L2
Unitree L2
$419
A depth camera
$359
A wide-angle 3D radar
$700+
Parameter comparison
- ProductUnitree L2A depth cameraA wide-angle 3D radar
- FOV360° × 96°86° × 57° (土3°)120° × 75°
- Non-repetitive scanning√xx
- Scanning methodNon-contact brushless rotating mirror scanningGlobal shutterSolid or quasi-solid state scanning
- Data reception processing CPU consumption ( Additional cost for user )Extremely lowHighHigh
- Scanning distance30m4-5m30m
- Nearby blind area0.05m0.1m0.3m
- IMU3-axis acceleration+ 3-axis gyroscopexx
- Power10W5W12W
- Size mm75×75×6590×25×25100×130×65
- Weight230gAbout 100gAbout 500g
- Operating environmentIndoor/outdoorIndoor/outdoor(close range)'Indoor/outdoor
- TechnologyLaser TOFInfrared binocularLaser TOF
Product Model
- Model
L2
L1 PM
(Precision Measurement)
L1 RM
(Remote Measurement)
- Price
$419
$249
$309
- Scanning distance
30m(@90% reflectivity)
15m(@10% reflectivity)
20m(@90% reflectivity)
10m(@10% reflectivity)
30m(@90% reflectivity)
15m(@10% reflectivity)
- FOV
360°×96°
360°×90°
360°×90°
- Sampling frequency
128000points/s
43200points/s
43200points/s
- Effective frequency
64000points/s
21600points/s
21600points/s
- Communication interface
ENET UDP/TTL UART
TTL UART
TTL UART
- 4D data
3D position +1D grayscale(supports 2D mode)
3D position +1D grayscale
3D position +1D grayscale
- Circumferential scanning frequency
5.55Hz(Customizable adjustment)
11Hz
11Hz
- Vertical scanning frequency
216Hz
180Hz
180Hz
- Distance resolution
4.5mm
8mm
8mm
- Measurement accuracy
≤ 2.0cm
± 2.0cm
± 2.0cm
- Nearbyblind area0.05m
- IMU3-axis acceleration +3-axis gyroscope
- Human eye safety levelClass 1(IEC60825-1:2014) Human eye safety
- Anti-glare capability>100KIux
[1]
L2 also supports negative angle mode, in which the field of view will be extended from 360°x90° to 360°x96°. The additional 6° of the field of view will have a slightly shorter maximum measurement distance.
[2]
The values shown here are typical reflectance values, and the actual values depend on environmental conditions and the characteristics of the target object.
[3]
To ensure effective detection of objects with different reflectance within the range, there may be a slight decrease in point cloud accuracy at certain positions. The farthest range is directly above the L2.
[4]
To ensure effective detection of objects with different reflectance within the range, there may be a slight decrease in point cloud accuracy at certain positions.
[5]
The stable power and peak power vary under different environmental conditions. When the ambient temperature is between -10°C and 30°C, L2 will automatically operate in a self-heating mode. Point cloud data will be generated only when the temperature meets the requirements, and at this time, the peak power can reach 13W. Please design the power supply reasonably to ensure the normal operation of the equipment.
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.
* Note: The parameters mentioned above may vary in different business scenarios and with different LiDAR configurations. Please refer to the actual application for accuracy.