机器人
机器狗 - 消费级/科研
行业应用
健身
产品推荐
服务与支持
关于宇树
APP 下载





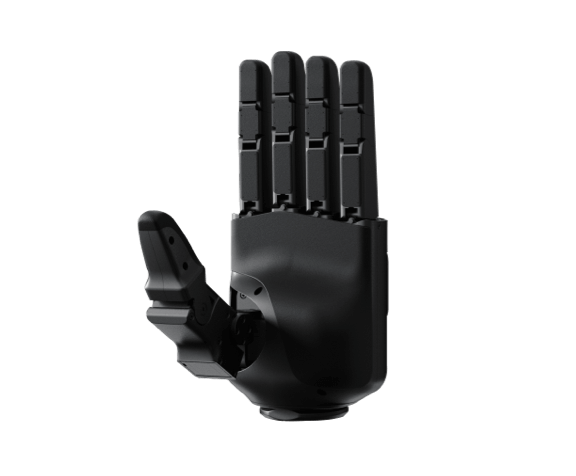















Unitree Dex5-1
灵动多变,随心触动
单手20自由度(16主动+4)
每个手指所有关节自由度均支持丝滑的反向驱动
摆脱“僵硬手”,让操作更丝滑,更方便RL直接训练

- 快如脱兔、动若游蛇自由度数量20
手指均可独立更换
5根
- ±22°四指侧摆
更好适应被抓持物体表面曲线,
提高抓握可靠

- 精准反馈,掌控毫厘之间
单手 94 个触觉传感器;
支持灵巧手触觉算法的二次开发
高功率密度
空心杯电机
高功率密度驱动器
与高精度编码器
低阻尼小间隙
减速器

微间隙设计,
顺滑自如
关节转轴更贴近表面,超小的关节间隙。
实现更流畅丝滑的抓握,避免关节转角卡入物体

Dex5-1
Dex5-1P
本体参数
重量
1000g
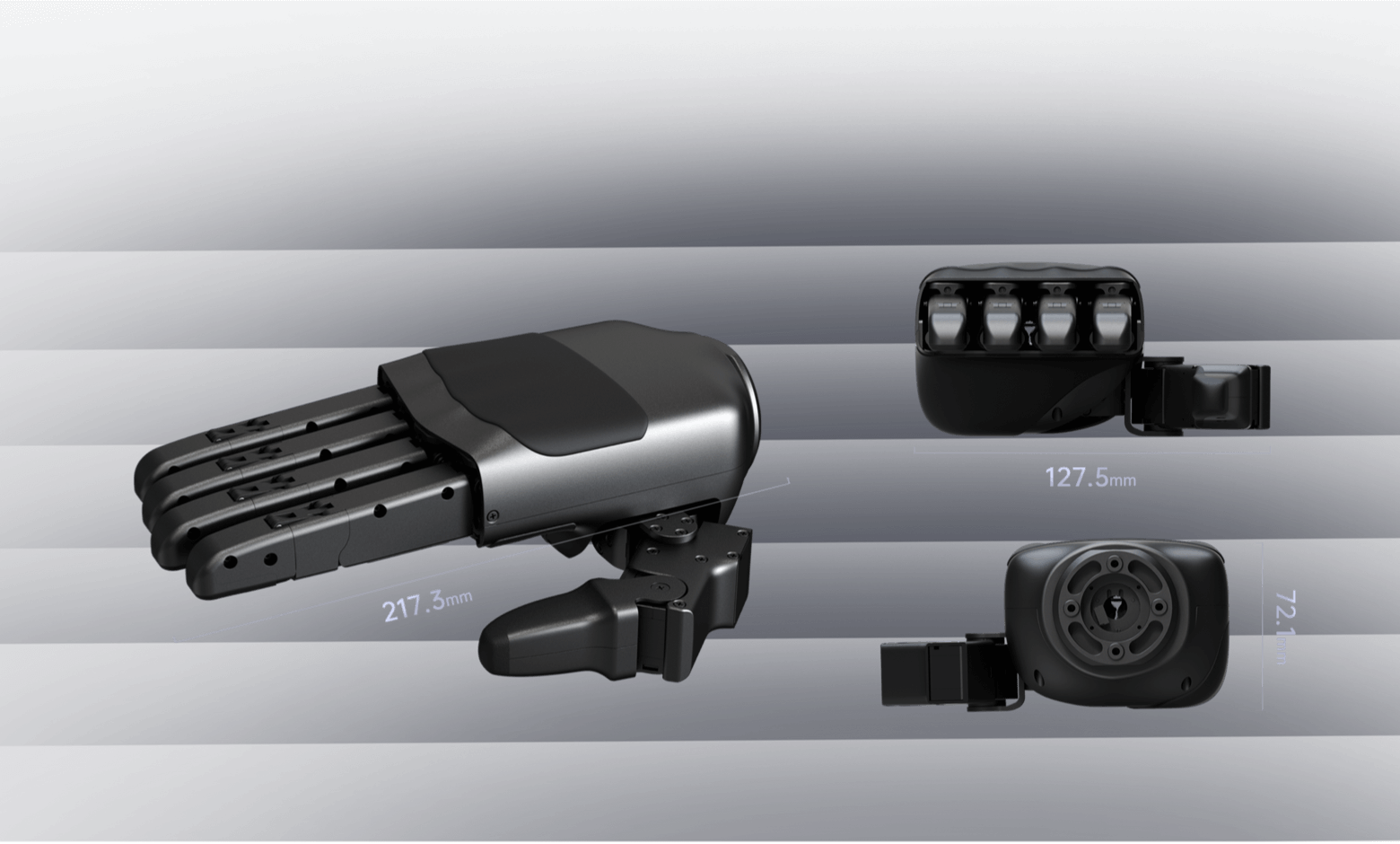
尺寸
217.3mm x 127.5mm x 72.1mm
(实际发货版本会有所调整)
主动自由度16个
拇指 x 4
食指 x 3
中指 x 3
无名指 x 3
小拇指 x 3
传动机构
12个自研微型力控复合传动关节
(可实现机器人无触觉本体感知)
4个微型力控关节齿轮传动
关节角度
拇指关节:
拇指关节0:-33.5°~39°
拇指关节1:0°~100°
拇指关节2:0~110°
拇指关节3:0~92°
四指关节:
指关节0:-22°~22°
指关节1:0°~90°
指关节2:0°~95°
指关节3:0°~81°(与指关节2耦合)
四指侧摆
±22°
最小抓握直径
10mm
指尖重复定位精度
±1mm
指尖力
10N
工作电压
24V~60V
静态电流
58V@0.2A
最大电流
58V@3A
通讯接口
USB2.0
工作温度范围
-20℃ ~ 60℃
负载情况(常温掌面向下,抓5cm的圆形硬性物体)
最大重量为3.5kg
负载情况(常温掌面向左,抓5cm的圆形硬性物体)
最大重量为4.5kg
感知参数
阵列传感器数量
/
阵列分辨率
/
感知范围
/
最大接受力(不损坏)
/
软件功能
通讯速率
1000Hz
整包字节数量
发送端:1234 bytes
接收端:1270 bytes
感知反馈
关节模式、关节位置、关节速度、关节力矩、关节温度、电压电流、imu 数据
控制反馈
关节模式、关节位置、关节速度、关节扭矩、关节刚度系数、关节阻尼系数
[1]
该数据为灵巧手平放状态下尺寸。
[2]
该数据为灵巧手受垂直朝下的直径为1cm的圆柱压迫时所受到的压力,在不同应用场景中有所差异,请以实际为准。
[3]
以上参数,在不同业务场景、不同型号参数配置等情况,在应用中有所差异,请以实际为准。
[4]
产品外观后续可能会有升级调整,请以届时实物为准。
本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
请访问宇树科技官网了解更多产品相关条款与政策,请遵守各地区法律法规。