Robot
Accessory

Go2 Battery
Fast Charging, Long-lasting Standby

Go2 Charger
High Security Protection, Fast Charging

R3 Controller
Newly Upgraded, Immersive Interaction

Go2 Foot End
Sense-sensitive, Reliable and Durable

Go1 Battery
Fast Charging, Long-lasting Standby

A1 Battery
Strong Power, Extraordinary Performance

Aliengo Battery
Excellent Motivation, Unlimited Ability
Industrial Applications
Fitness
Services And Support
About Unitree
APP Download





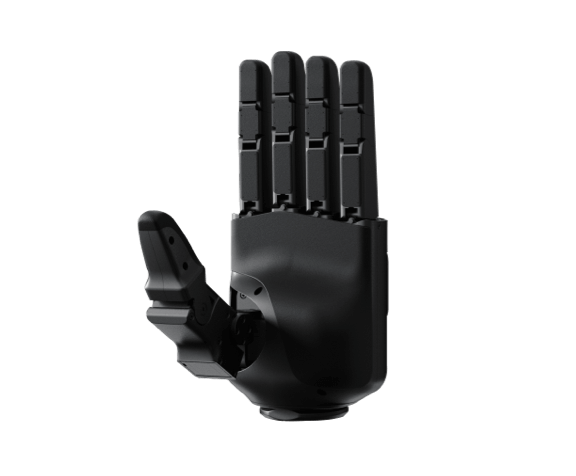








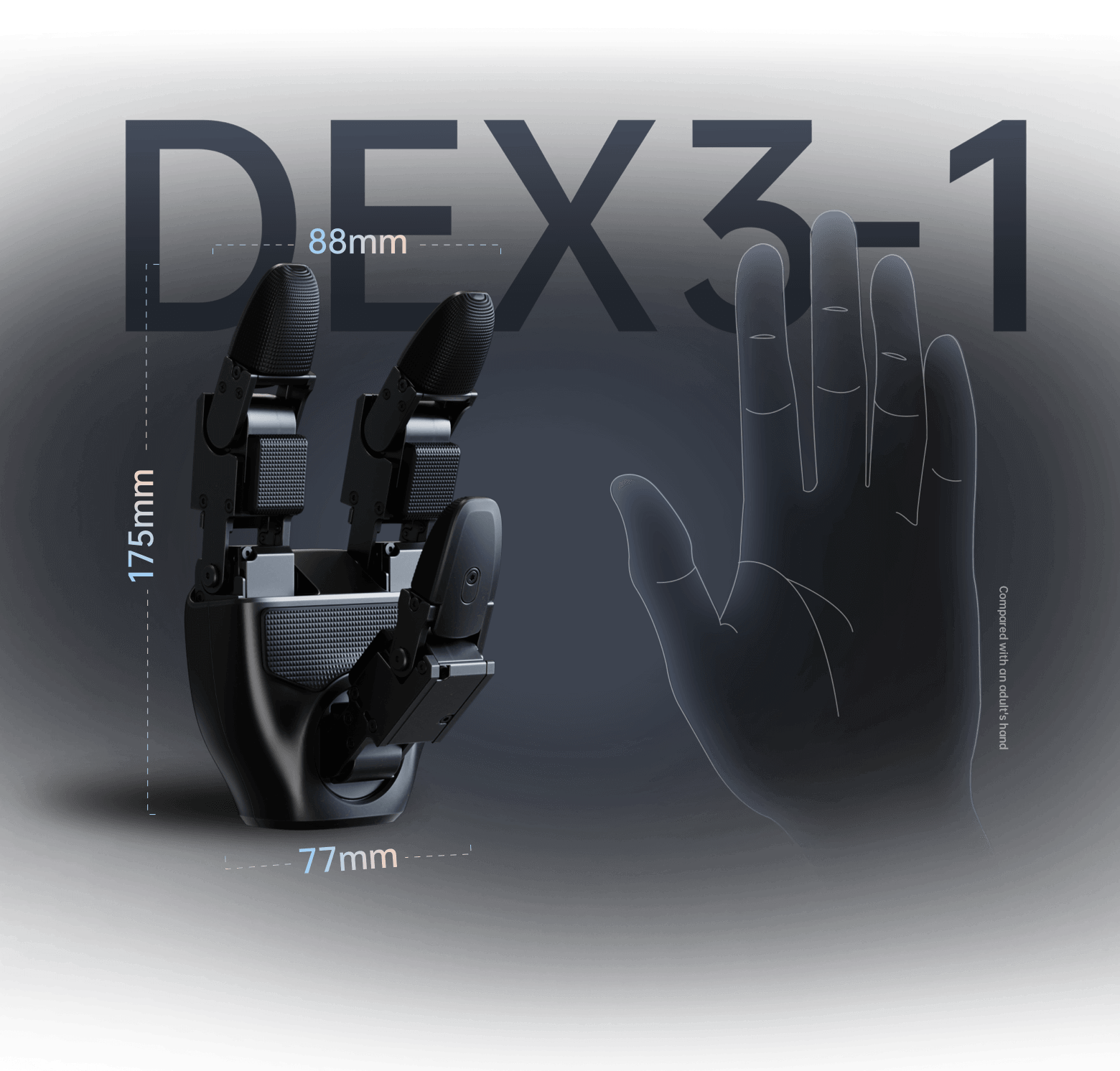
Unitree Dex3-1
Power Control Dexterous Hand, Operate Everything
Combined with force and position hybrid control, it is sensitive and reliable,
and can simulate the precise operation of the object
Dex 3-1
Dex3-1 three-finger dexterous hand, with 7 degrees of freedom 7 motion off machine: 6 micro brushless force control joint direct drive, 1 micro brushless force control joint gear drive, one hand with 33 tactile sensors. It can be used with G1 humanoid robot to perform various complex actions.

Body Parameters
Weight
710g
Size
175mm x 88mm x 77mm
Degrees of Freedom
Thumb x 3
Index Finger x 2
Middle Finger x 2
Transmission Mechanism
6 Motors Drive Directly
1 Motor Drive with Gears
Angle of Joint
Thumb Joint 0: -60°~60°
Thumb Joint 1: -35°~60°
The Thumb Joint 2: 0 to 100°
Index Finger Joint 0: 0 °~90°
Index Finger Joint 1: 0 °~100°
Middle Finger Joint 0: 0 °~90°
Middle Finger Joint 1: 0 °~100°
Fingertip Repeat Positioning Accuracy
±2mm
Working Voltage
12~58V
Static Current
58V @ 0.2A
Maximum Current
10A
Communication Interface
USB2.0
Working Temperature Range
-20℃ ~ 60℃
Load Conditions ( Palm Facing Down At Room Temperature, Grasping A 5cm Round Hard Object)
The Maximum Weight is 500g
The Maximum Power Is: 400W@3s
Load Condition (Palm Facing Left At Room Temperature, Grasping A 5cm Round Hard Object)
The Maximum Weight is 500g
The Maximum Power Is: 400W@3s
Sensing parameters
Number of Pressure Sensors
9 (Total of 33 Pressure Sensors)
Array resolution
2 x 2 (Palm) x 3
2 x 2 (Single Finger Pad) x 3
3 x 1 (Single Fingertip) x 3
Range of Perception
10g-2500g
Maximum Acceptance (Unamaged)
20kg
Software functions
Communication rate
1000Hz
The number of bytes in a full packet
Sender:1234 bytes
Receiver:1270 bytes
Perceptual feedback
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Temperature, Voltage and Current, Sensor Pressure Value, Sensor Temperature Value, imu Data
Control feedback
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Stiffness Coefficient, Joint Damping Coefficient
Miniature Brushless Force Control Joint Parameters
Model
F-1515-108 Miniature Brushless Force Control Joint
F-1515-214 Miniature Brushless Force Control joint
Weight
45g
Size
34.8mm x 23.1mm x 23.3mm
Reduction Ratio
1:108
1:214
Maximum Torque (Ideal)
0.76Nm
1.498Nm
Maximum Torque (Actual)
The Torque Is In The Same Direction As The Speed:0.49Nm
The Torque Is In The Same Direction As The Speed:0.86Nm
The Toque Is In The Opposite Direction of The Rotational Speed:1.37Nm
The Toque Is In The Opposite Direction of The Rotational Speed:3.1 Nm
Maximum Rotational Speed
23rad/s
11rad/s
Maximum Line Current
4.76A
Communication Control Frequency
1000Hz
Method of Communication
High Speed Unibus
Encoder
Rotor Absolute Value Encoder
Working Temperature Range
-20℃ ~ 60℃
IP Rating
/
Working Voltage
12-24V
Motor Preceived Feedback
Torque, Angle, Angular Velocity, Temperature
Motor Control Instruction
Torque, Angle, Angular Velocity, Stiffness, Damping
[1]
It is the size of the dexterous hand in flat state.
[2]
The data refers to the pressure exerted by the dexterous hand when it is pressed by a vertical downward cylinder with a diameter of 1cm, which varies in different application scenarios. Please refer to the actual situation.
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.