Lightweight and Agile, Dominating the Game
With a steady gait and impressive speed, effortlessly scoring in one-on-one situations
Lightweight and Agile, Dominating the Game
With a steady gait and impressive speed, effortlessly scoring in one-on-one situations
Stable and Resilient, Unperturbed by Distractions
Featuring industry-leading motion control systems, designed to excel in competitive match environments
Agility and superior strength
Based on the Yolo 11 network algorithm, rapid identification of the stadium environment and accurate positioning are achieved
unitree_rl_gym
reinforcement learning framework
Efficient Simulation Environment: Integrate simulation tools such as Isaac Gym and Mujoco to provide efficient physical simulation capabilities.
Flexible Training Configuration: Users can adjust training parameters through the configuration file, such as the number of environments, random seeds, maximum number of iterations, etc.
Complete Training Process: Supports the entire process from simulation training (Sim2Sim) to real robot deployment (Sim2Real).
RoboCup SDK
Development Guide
Visual Recognition API: Built-in YOLO11 latest generation real-time target detection algorithm, providing a rich stadium information interface.
Spatial Positioning API: Provides an accurate stadium position information interface through monocular geometric positioning and binocular depth positioning.
Motion Control API: Provide various motion control interfaces to the decision system based on visual detection results, venue information, competition rules, etc.
Unitree G1-Comp

Unitree G1-Comp
Building the Future Together, Fighting the Race
API
High-level operation control interface, Low-level operation control interface
Status service interface, DDS communication interface
Audio Lighting Service Interface
Simulation Environment
Isaac gym
Mujoco
Multimodal Interaction
UnifoLM Large Model
Support TTS, ASR
Support Yolo Recognition Algorithm
ROS Support
Compatible with ROS Ecosystem
APP Support
Quickly Configure Robots and View Status
Develop Computing Unit
Orin NX
Provides 100TOPS AI computing power
Dual Encoder
Accurate and stable, no fear of interference
Strong and Durable
The shell is covered with aluminum alloy
and high-strength engineering plastics
Body Size
Weight about 35kg
Height about 130cm
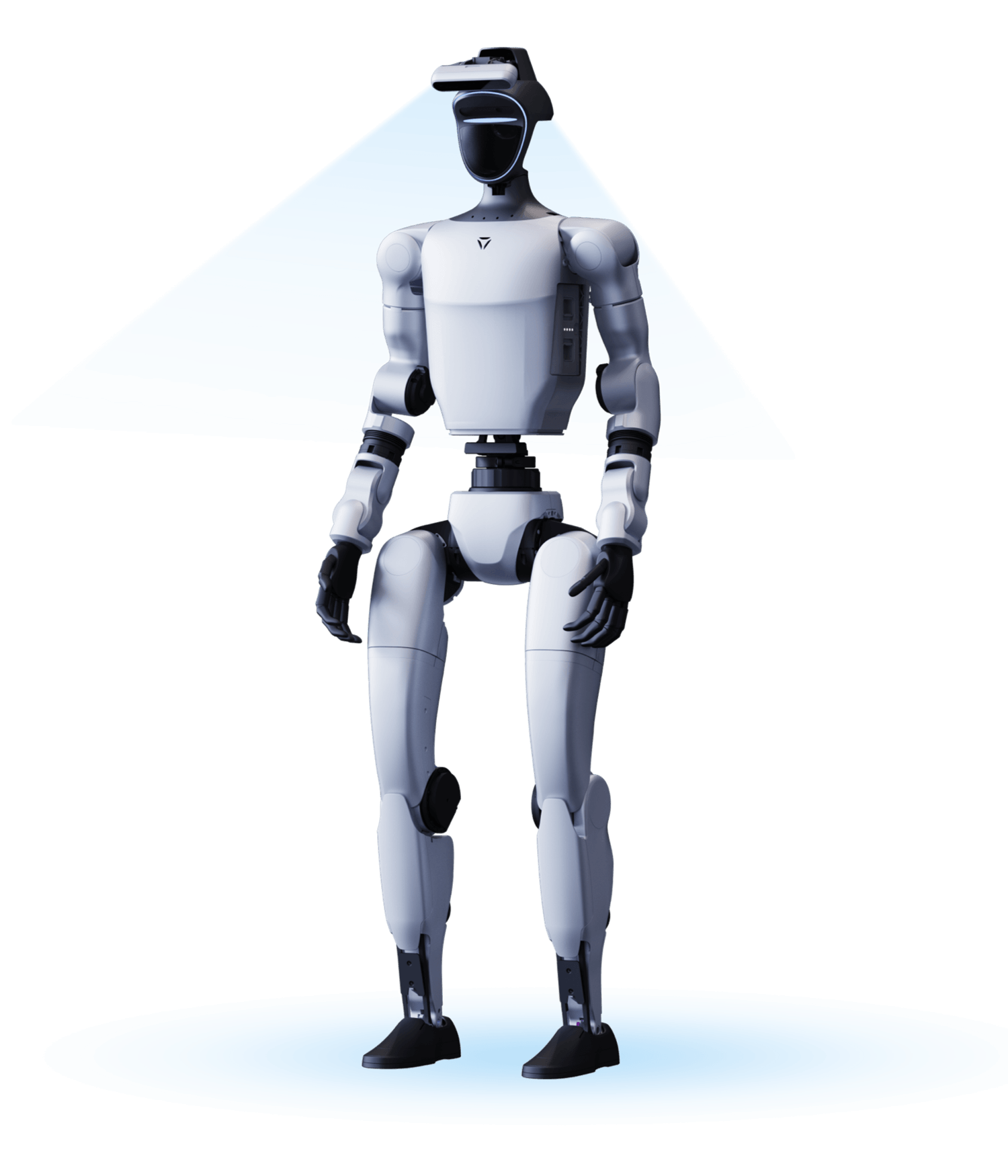

Battery Life
About 2 hours, supports quick change and fast charging
Model
G1 Comp
Height, Width and Thickness(Stand)
1320x450x200mm
Height, Width and Thickness(Fold)
690x450x300mm
Weight (With Battery)
About 35kg+
Total Degrees of Freedom(Joint Freedom)
25-45
Single Leg Degrees of Freedom
6
Waist Degrees of Freedom
1+(Optional 2 additional waist degrees of freedom)
Single Arm Degrees of Freedom
5
Head 2 degrees of freedom
2
Single Hand Degrees of Freedom
7(Optional Force control of three-fingered hand)+2(Optional 2 additional wrist degrees of freedom)
*Three-fingered dexterous hand Dex3-1 Parameter: The thumb has 3 active degrees of freedom; the index finger has 2 active degrees of freedom; the middle finger has 2 active degrees of freedom.
**Dex3-1 can optionally be installed with tactile sensor arrays
Maximum Torque of Knee Joint【1】
120N.m
Arm Maximum Load【2】
About 3Kg
Calf + Thigh Length
0.6M
Arm Span
About 0.45M
Extra Large Joint Movement Space
Waist joint:Z±155°、X±45°、Y±30
Knee joint:0~165°
Hip joint:P±154°、R-30~+170°、Y±158°
Wrist joint:P±92.5°、Y±92.5°
Full Joint Hollow Electrical Routing
YES
Joint Encoder
Dual encoder
Cooling System
Local air cooling
Power Supply
13 string lithium battery
Basic Computing Power
8-core high-performance CPU
Sensing Sensor
Depth camera、3D LiDAR
4 Microphone Array
YES
5W Speaker
YES
WiFi 6 、Bluetooth 5.2
YES
High Computing Power Module
Multiple brands and models available
such as Orin NX, etc.
Smart Battery (Quick Release)
9000mAh
Charger
54V 5A
Manual Controller
YES
Battery Life
About 2h
Upgraded Intelligent OTA
YES
Secondary Development【3】
YES
Price(Tax and Shipping cost excluded)
Contact sales
[1]
The maximum torque of the joint motors of the whole machine is different. This is the maximum torque of the largest joint motor among them.
[2]
The maximum load of the arm varies greatly under different arm extension postures.
[3]
For more information, please read the secondary development manual.
[4]
The above parameters may vary in different scenarios and configurations, please subject to actual situation.
[5]
The humanoid robot has a complex structure and extremely powerful power. Users are asked to keep a sufficient safe distance between the humanoid robot and the humanoid robot.Please use with caution
[6]
The product appearance is subject to change. Please refer to the final product.
[7]
Some sample functions on this page are still being developed and tested, and will be opened to users in the future.
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.