20 Degrees of freedom (16 active+4)
High Precision, Ultimate Control
Each finger joint has degrees of freedom to support smooth backdrivability.
Eliminates "stiff hands", making operations smoother and more convenient for reinforcement learning(RL) training.
- Ultra-fast Reflexes, Snake-like FlexibilityNumber of degrees of freedom205pieces
All five fingers can be replaced independently

- ±22°Four-finger Lateral Swing
Improved grip reliability and adapts more effectively to curved surfaces of grasped objects.

- Precise Feedback, Control Every Millimeter
94 tactile sensors per hand;
supports secondary development of tactile algorithms for dexterous hands
High-power density
hollow-cup motor
High-power density drive
and high-precision encoder
Low damping small clearance reducer
Micro-gap design ensures smooth and effortless motion
The rotation axis of joint is closer to the surface, with ultra-small joint gaps.
This enables a smoother and more fluid grasp, preventing joint corners from getting stuck on objects.
Product Parameters
Dex5-1
Dex5-1P
Body Parameters
Weight
1100g
1100g
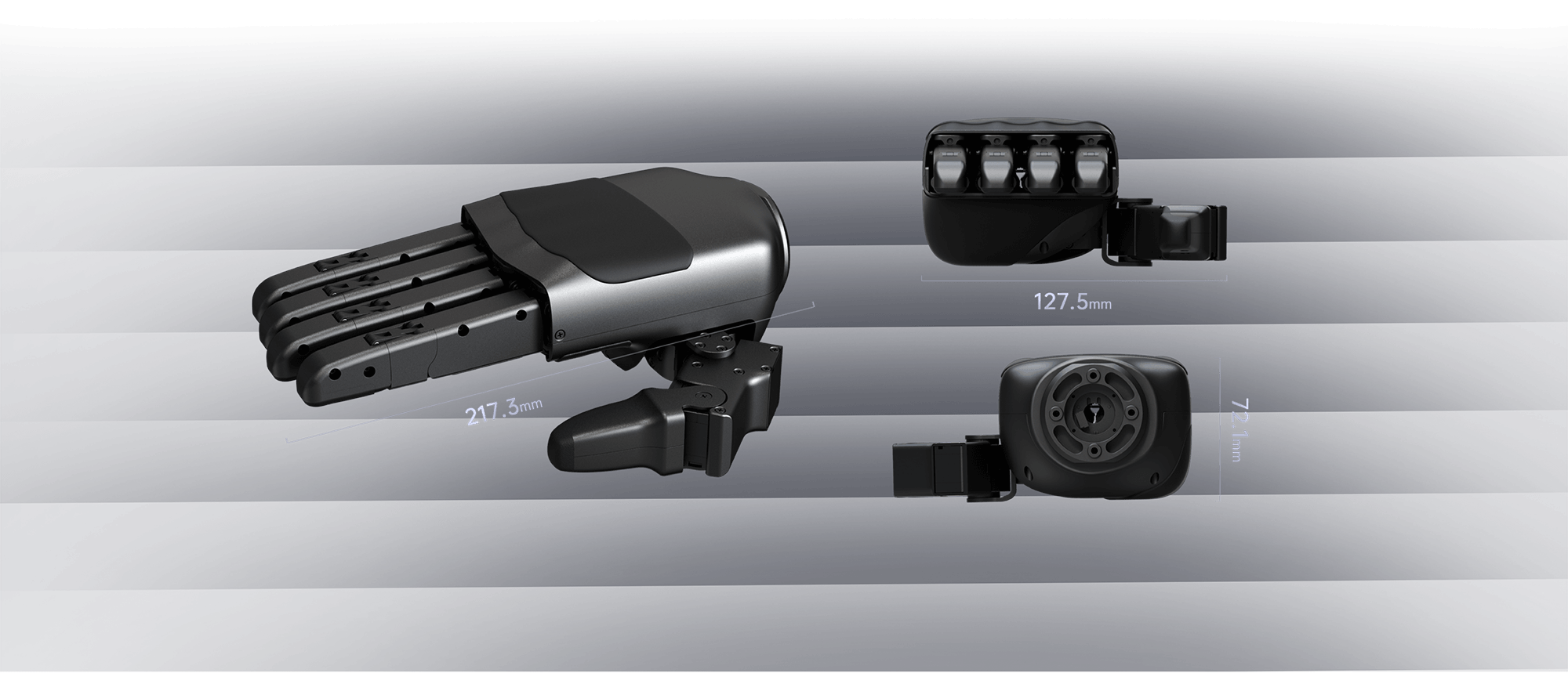
Size
217.3mm x 127.5mm x 72.1mm
(The final shipped version may vary.)
217.3mm x 127.5mm x 72.1mm
(The final shipped version may vary.)
Degrees of Freedom
Thumb x 4
Index Finger x 3
Middle Finger x 3
Ring Finger x 3
Little Finger x 3
Thumb x 4
Index Finger x 3
Middle Finger x 3
Ring Finger x 3
Little Finger x 3
Transmission Mechanism
12 self-developed micro force-controlled composite transmission joints
(enables robot to achieve tactile proprioception)
4 micro force-controlled joint gear transmission
12 self-developed micro force-controlled composite transmission joints
(enables robot to achieve tactile proprioception)
4 micro force-controlled joint gear transmission
Angle of Joint
Thumb Joint:
Thumb Joint 0: -33.5°~39°
Thumb Joint 1: 0°~100°
Thumb Joint 2: 0°~110°
Thumb Joint 3: 0°~92°
Four-Finger Joints:
Knuckles 0: -22°~22°
Knuckles 1: 0°~90°
Knuckles 2: 0°~95°
Knuckles 3: 0°~81°(Coupling with finger joint 2)
Thumb Joint:
Thumb Joint 0: -33.5°~39°
Thumb Joint 1: 0°~100°
Thumb Joint 2: 0°~110°
Thumb Joint 3: 0°~92°
Four-Finger Joints:
Knuckles 0: -22°~22°
Knuckles 1: 0°~90°
Knuckles 2: 0°~95°
Knuckles 3: 0°~81°(Coupling with finger joint 2)
Four-Finger Lateral Swing
±22°
±22°
Minimum grip diameter
10mm
10mm
Fingertip Repeat Positioning Accuracy
±1mm
±1mm
Fingertip strength
10N
10N
Working Voltage
24V~60V
24V~60V
Static Current
58V@0.2A
58V@0.2A
Maximum Current
58V@4A
58V@4A
Communication Interface
USB2.0
USB2.0
Working Temperature Range
-20℃ ~ 60℃
-20℃ ~ 60℃
Load Conditions ( Palm Facing Down At Room Temperature, Grasping A 5cm Round Hard Object)
The Maximum Weight is 3.5kg
The Maximum Weight is 3.5kg
Load Condition (Palm Facing Left At Room Temperature, Grasping A 5cm Round Hard Object)
The Maximum Weight is 4.5kg
The Maximum Weight is 4.5kg
Sensing parameters
Number of Pressure Sensors
/
12 (94 pressure sensors in total)
Array resolution
/
2 x 5 (Palm)
2 x 3 (Single Finger Pad) x 5
2 x 3 (Single Fingertip) x 5
2 x 3 (Single Finger Root) x 4
Range of Perception
/
10g-2500g
Maximum Acceptance (Unamaged)
/
20kg
Software functions
Communication rate
1000Hz
1000Hz
The number of bytes in a full packet
Sender:1234 bytes
Receiver:1270 bytes
Sender:1234 bytes
Receiver:1270 bytes
Perceptual feedback
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Temperature, Voltage and Current, imu Data
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Temperature, Voltage and Current, Sensor Pressure Value, Sensor Temperature Value, imu Data
Control feedback
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Stiffness Coefficient, Joint Damping Coefficient
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Stiffness Coefficient, Joint Damping Coefficient
[1]
It is the size of the dexterous hand in flat state.
[2]
The data refers to the pressure exerted by the dexterous hand when it is pressed by a vertical downward cylinder with a diameter of 1cm, which varies in different application scenarios. Please refer to the actual situation.
[3]
The above parameters may vary in different scenarios and configurations, please subject to actual situation.
[4]
The product appearance is subject to change. Please refer to the final product.
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.