Lightweight, Take It Everywhere
 View the Robot Dog Motion Simulation >
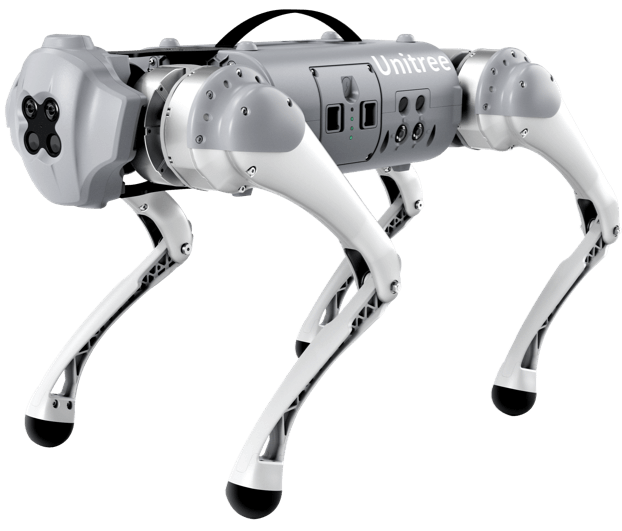
View the Robot Dog Motion Simulation >Unitree Go1
The World's First Intelligence Bionic Quadruped Robot Companion of Consumer Level
Watch Video →
Weight
12
kg
Length * Width * Height (fold)
0.588 x 0.22 x 0.29
m
Adaptive Load Capacity
≈ 3-5
kg
Lightweight, Take It Everywhere
High Dynamics
17km/h
ISS Smart
Concomitant
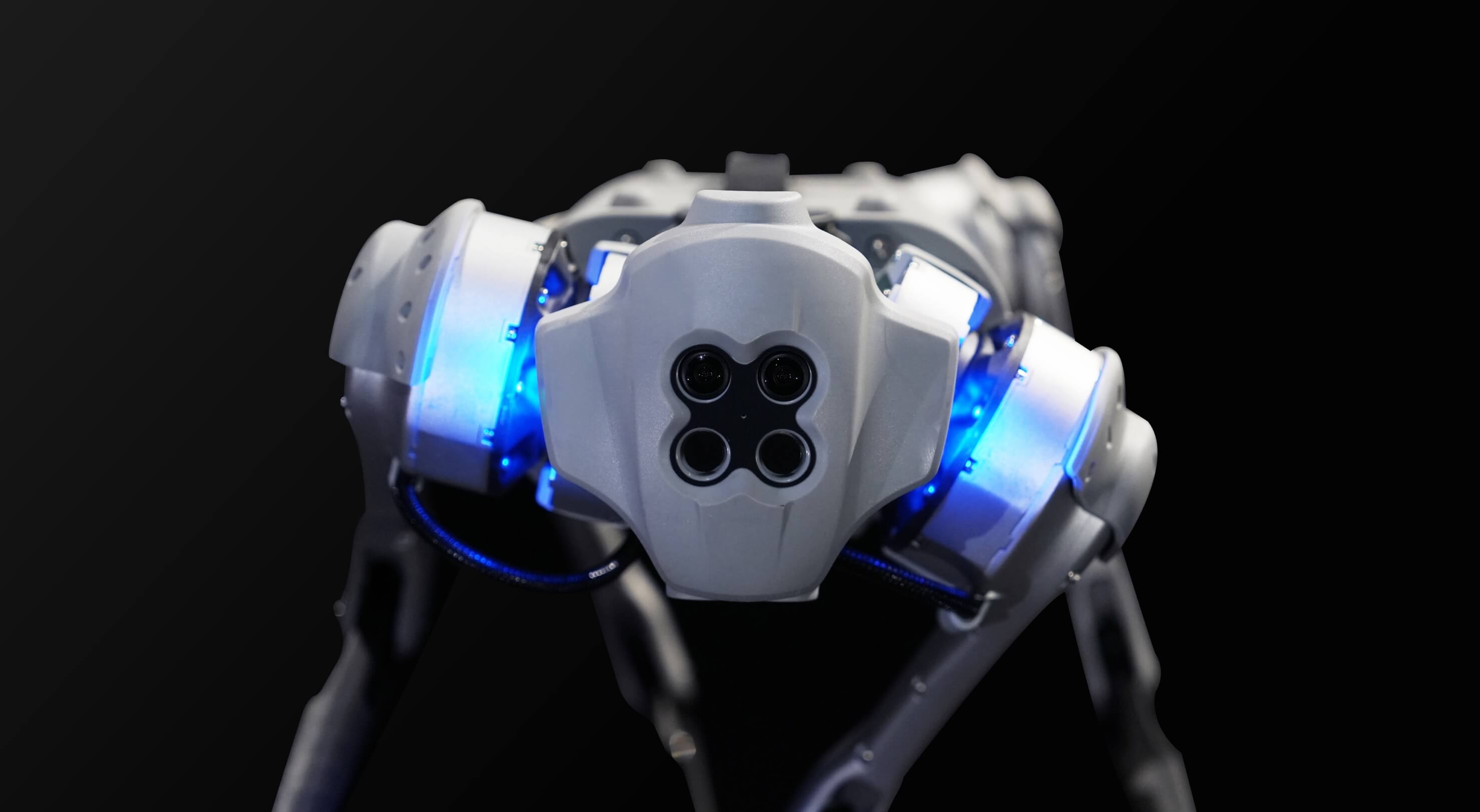
SSS Super-sensing
10-view Detection
AI Detection,
Human Recognition, etc.
Flexible and
Adaptive Joints
Long
Endurance
SSS Super-sensing System
SSS Super-sensing Viewing Angle Coverage
1 set of fisheye binocular depth sensing angle
≈ 150 x 170°
5 sets of fisheye binocular depth sensing
fisheye AI sensing
1 set of fisheye binocular depth sensing
≈ 4 sets of intel realsense sensing angle
Thus: 5 sets of fisheye binocular depth sensing ≈ 20 groups of intel realsense sensing angles
Fisheye AI sensing: human recognition, etc.






ISS Intelligent Concomitant System
Adopt patented wireless vector positioning and control technology
Advantages
1、The robot is in the person's lateral peripheral vision, it is better than the conventional follow mode with natural human-computer interaction, safe and secure.
2、No need to always look back and worry about whether the robot is lost or encounters obstacles.
3、When the environment is complex, people can actively choose a simpler route to help the robot pass.
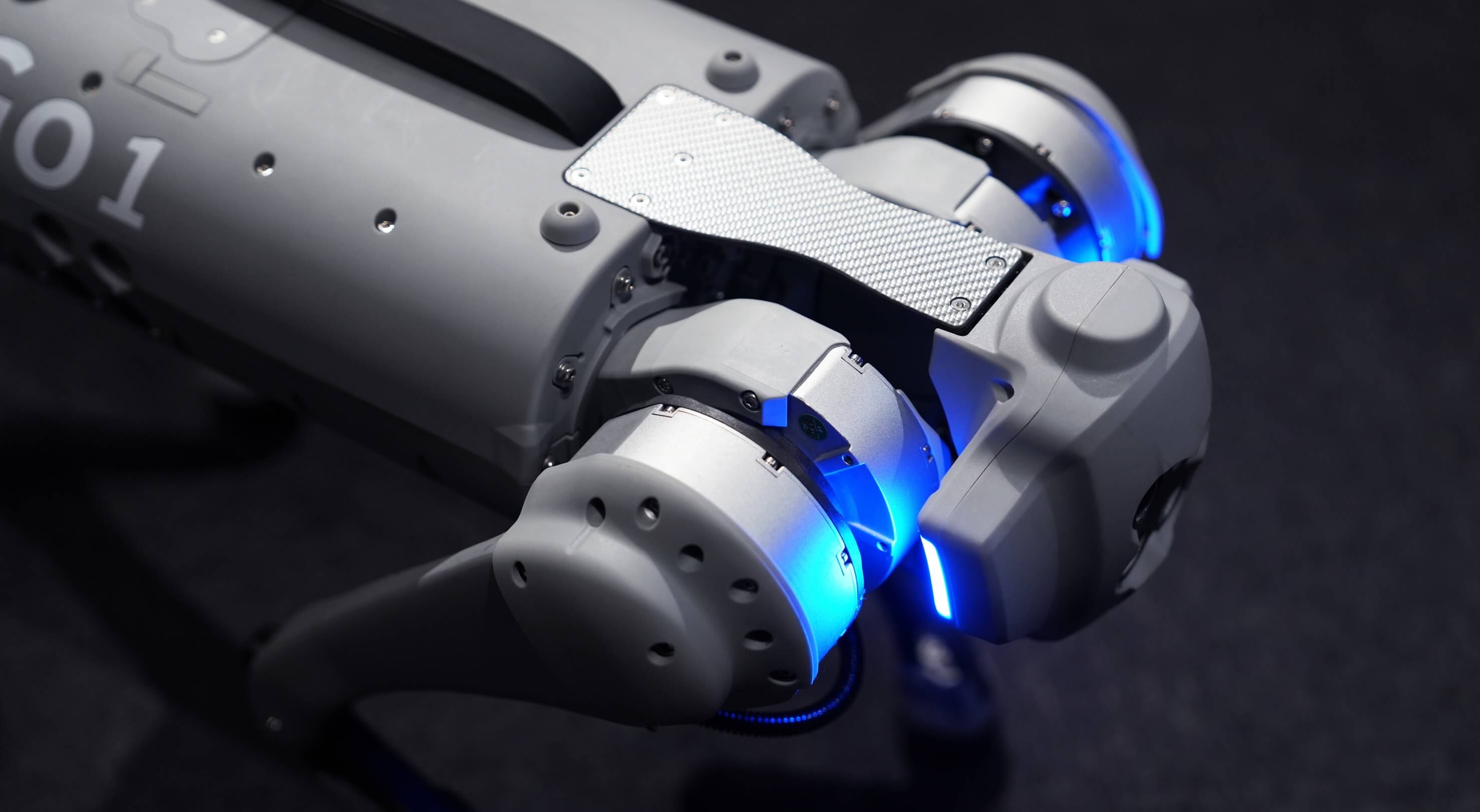
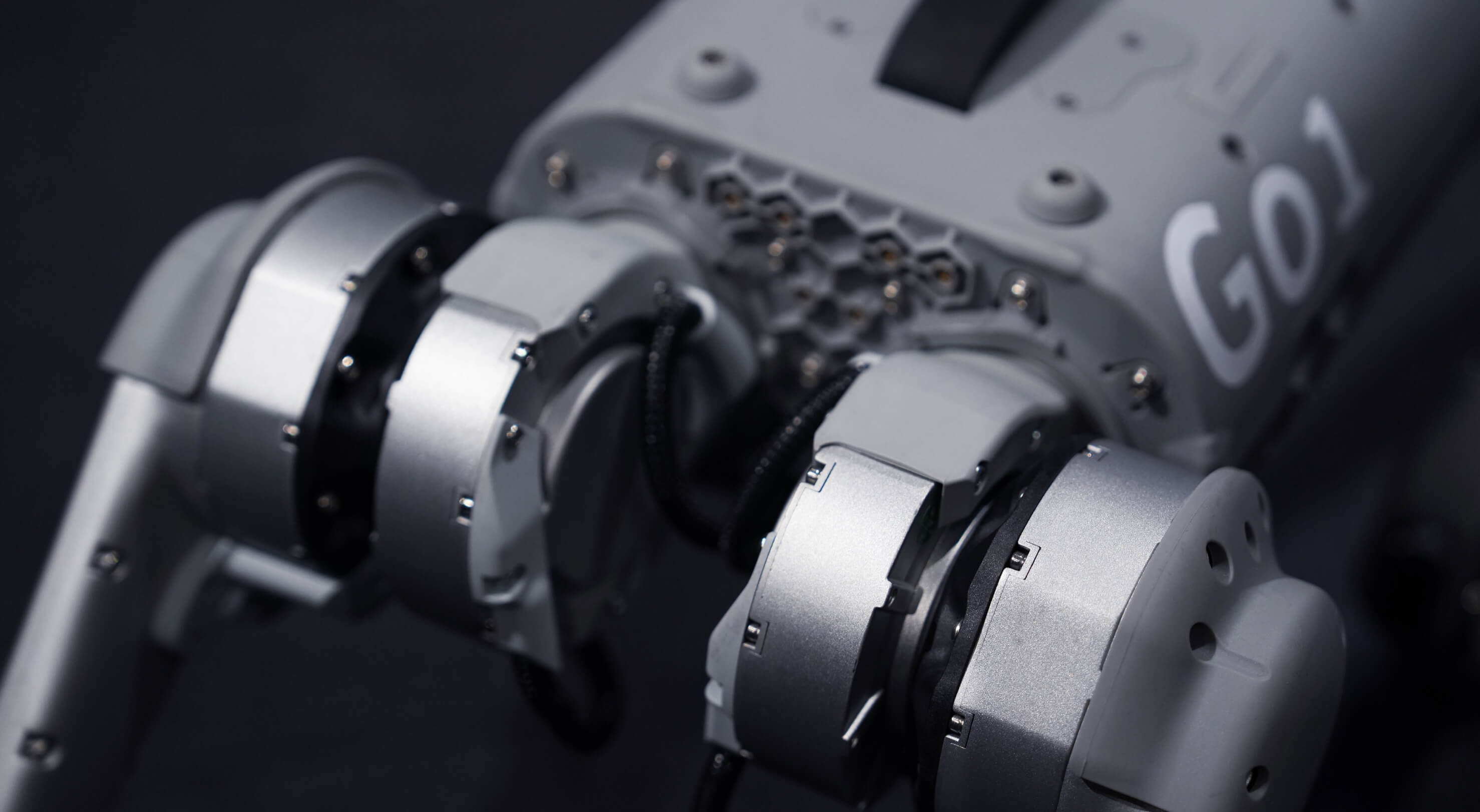
Robust and Reliable Powertrain
Flexible and Adaptive Joints
1、The new patented design of ultra-lightweight low-noise long-life power joints.
2、Body/Thigh Joint C1-8: 520g 23.70N.m (MAX).
3、Knee Joint C1-8×1.5 ratio 35.55N.m (MAX).
4、A patented heat pipe-assisted heat dissipation system is built into the vicinity of the knee joint motor.
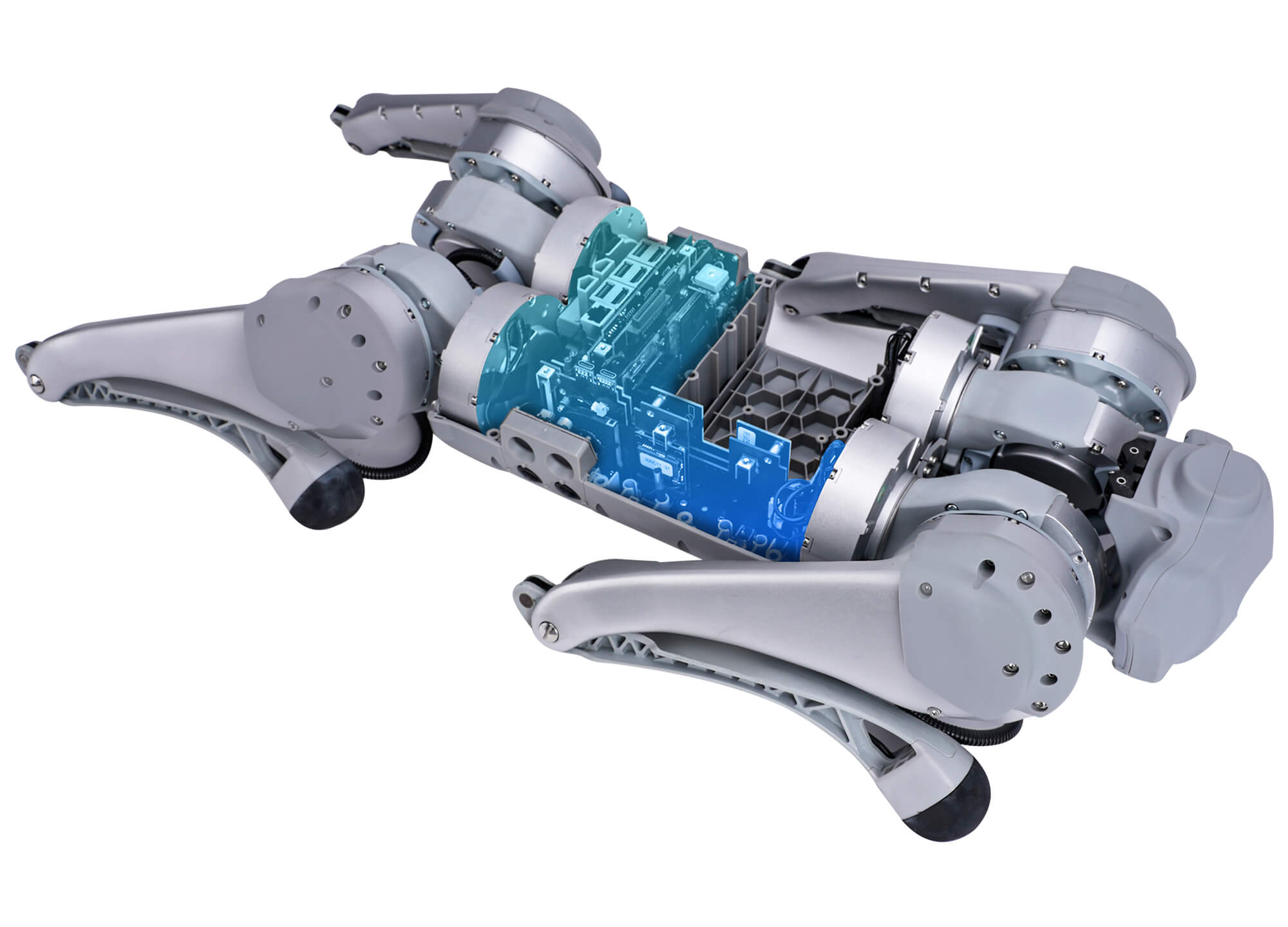
Go1 with Built-in Super AI Hash Rate
Total: 16-core top CPU + GPU (384Core, 1.5TFLOPS)
Reference, TX2 only has CPU (4 cores) + GPU (256Core, 1.3TFLOPS), and the unit price of the chip is 3000+ RMB.




SSS 1
Super-sensing System
1 pair
5 pair
5 pair
Sensing Calculation
1*(4*1.43GHz
128Core0.5T)
3*(4*1.43GHz
128Core0.5T)
2Nano+ (1Nano
or 1NX)
ISS 1 Intelligent
Concomitant
●
●
●
RTT 1 Pictures
Transaction
●
●
●
Charger
24V,4A
24V,6A
24V,6A
Remote Control
●
●
●
Load
≈4kg(limit ~ 10kg)
≈4kg(limit ~ 10kg)
≈6kg(limit ~ 10kg)
Heat Pipe Assisted Heat Dissipation
●
●
●
Motion Speed
0 ~ 2.5m/s
0 ~ 3.5m/s
0 ~ 3.7m/s
(limit ~ 5m/s)
Silver alloy
precision joint motor
12 piece
12 piece
12 piece
Large joint
movement space
body:-49~49°
thigh:-39~257°
shank:-161~-51°
body:-49~49°
thigh:-39~257°
shank:-161~-51°
body:-49~49°
thigh:-39~257°
shank:-161~-51°
Aluminum thigh
●
●
●
Battery
1 piece
1 piece
1 piece
Graphical Programming Interface
(provide later)
●
●
●
Scientific Programming Interface
○
○
●
Python Programming
Interface
○
○
●
HAI 1
Human Sensing
○
○
●
APP God View
○
●
●
4G
○
○
●
Foot-end Physical
Force Sensor
○
○
●
Multifunctional Peripheral
Expansion Interface
○
○
●
Radar
○
○
2D or 3D optional
Price(Tax and freight excluded)
$2700
$3500
Contact Sales
Warranty Period
6 months (core components)
3 months (non-core components)
12 months (core components)
6 months (non-core components)
12 months
Please be aware that the product that the user gets in hand will differ from the robot in this article in terms of appearance color and individual details. The features and performance metrics are basically the same as mentioned in this article.
The previous world record MIT mini cheetah is 3.7m/s; This speed comes from the product's ultimate speed test, and for safety and stability, the actual speed will be limited. For long-term outdoor operation, please use it in cool weather. Please keep a certain safe distance from the robot when using, especially do not let minors touch the robot which is powered on.
The vector positioning mainly uses radio signals, when there is an obvious obstruction between humans and robots, there is a high probability that the robot will lose the actual position of the person. Therefore, when operating, we can artificially choose an ideal route of travel.
For binocular depth sensing to work properly, please ensure the ambient lighting conditions are good and that obstacles are textured on the surface. There is a possibility of mutual interference between ultrasonic probes, please ensure that there is no ultrasonic emitter around the robot.
At the current time, there is generally only one camera enabled by default.
Due to the complexity of the human living environment, if conditions permit, please choose a more open route to minimize the triggering of the autonomous evasion function of the robot itself.
God View mainly provides a multi-faceted image transmission function, which is convenient for users to view the surrounding and terrain conditions of the robot dog when using the APP control.
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.